|
|
|
|
SG-GJD12 ����һ�廯����ʵѵ�豸
һ����Ʒ����
����һ�廯����ʵѵ�豸�ʺ��е�ְҵѧУ�ġ���е���������������豸��װ��ά�ޡ��������缼��Ӧ�á�����������������ơ�������������Ӧ�á�����������PLC���Ƽ����������ɱ�̿���������������PLC����Ӧ�á������˻�������̬��Ӧ�á����������������Ӧ�á�������ҵ�����˻�����Ӧ�á������˶����Ƽ�����Ӧ�á�������Ƶ��������Ӧ�á��������ӵ���Ӧ����ά�ޡ���רҵ�γ̵�ʵѵ��ѧ��Ҳ�ʺ��и�ְѧУ��ְҵ��ѵѧУ��ְ�����ġ�����վ��PLCʵ�١����ܼ������ˡ�
����һ�廯����ʵѵ�豸Ҫ����4�����Ͻ�ʽ����ƽ̨��Ϊ����ƽ̨������ṹӦ���ÿ���ʽ�Ͳ�װʽ���ܹ����ݲ�ͬ��ʽ��������Ҫ���ʵѵ̨��ϳɲ�ͬ�����Ļ��������棬Ȼ���ڻ���ƽ̨�ϸ������еĻ�е��������ģ�黯�ķ�ʽ��װ�ʹ�����������ܵĻ���һ�廯�����������豸����Ӧ������������е������װ���������豸��ʹ����װ���ܹ����İ���ѧ����Ҫ����װ�����������ܵĻ���һ�廯�����������豸��
������������
1�������Դ������������AC 380V±10% 50HZ�����빦�ʣ�2 kw���豸����:≥300kg����վ�ɷ������ϣ�����ߴ�Լ3600mm×800mm×1800mm
2����ȫҪ���нӵر�����©�籣�����ܣ���ȫ�Է�����صĹ��ұ������ø߾�Ե�İ�ȫ�Ͳ���������Ե���ĸ�ǿ�Ȱ�ȫ��ʵ�鵼�ߡ�
�����豸���
1���豸̨��
��1��Ҫ��ÿ������վ���Ͳĵ���ʽʵѵ̨��Ϊ����ƽ̨��̨��������Ͻ�ṹ���Ͳı����б��������̶��ۣ�����֮�����40mm���ײ�����˫�����л������š�ʵѵװ�ÿɵ�վ����ϣ��ܹ����ݲ�ͬ��ʽ��������Ҫ���ʵѵ̨��ϳɲ�ͬ�����Ļ��������档
��2��ʵѵ̨�ĵ������Ƶ�ԪҪ���������ʽ���룬�ܸ��ݲ��õĿ���Ҫ��ѡ�����չ��صĵ�������Ԫ��������װ�ڳ����������ϡ�
2����Դ����
�豸��Դ���õ��������䣬�ⲿ����ӦΪ����������AC 380V�Ľ��߷�ʽ��ϵͳ��Ԫ�и���Ҫ����ͨ��С�Ͷ�·���ص������硣����һֱ̨��������ѹ��Դ�����DC24V/10A,Ϊϵͳ�ṩ�ȶ��ɿ��Ŀ���ֱ����Դ��
3������վһ
��1������ֿ�װ�ã�����ʽ������������������徫�ӹ����գ�������15���ϲۣ����ϲ���Ƕ��RFID���ӱ�ǩ����������ά��ͼ�α�ǩ���ܹ��Բֿ�����Ͻ������ݻ���Ϣ�������ڶ�д��Ϣʱ��ͨ��RFID��д��������ɨ��ǹ����������Ϣ��¼��Ͷ�ȡ��ʵ�ֲִ������ܻ�����Ϣ�������������ֳ�ɨ��ǹ��
��2������ץȡװ�ã�����XYZ��������ʽģ��ץȡ�������ɶ�ռ������ɶ�λ�ƶ���
��3����������1������2̨�����ŷ�ϵͳ�Ͳ�������ϵͳ������XYZ��������ʽģ�顣
��4����������2�����ò�����7���ɫ��������������̫��ͨѶ�ӿڡ����װ�װ֧�ܣ����Ƶ�Դ���ؿ��ơ�
��5����������3�����ñ�Ƶ�������ʲ�����0.37KW����PLC����Ʒ��һ�¡�����exe.��Ƶ����ѧ�������������豸���õı�Ƶ���ͺ�һ�¡���ԴҪ������37��ѧϰ��Ŀ�������������ڹ������ص㡢�����������ʹ�á��������ԡ����Ӻ�1�����Ӻ�2��Ӧ�úꡢ�����ƶ����ܡ�����б��ʱ�䡢����ת�ؼ��ӹ��ܡ�����ģʽ��˯��ģʽ������ģʽ��Modbusͨ�š�USSͨ�ŵȣ�Ͷ���ļ��г�������Ŀ������������4�����������ͼ֤���Ӹǹ��¡�
��6�����ð�ť��ָʾ�ơ���ɫ����ָʾ�Ƶ�ģ�顣
��7���豸����䣺©�翪�أ�3P+N 16A����·����3P 10A����·����2P 5A�����ص�Դ DC24 6A����λ����˫�á��������ӵز��� 1 ̨
��8�������һ�廯���߶��ӣ��豸��PLC I/O ���ӡ���Ƶ���Ľ��߶��ӡ���ָ��ء���翪�ء���������ָʾԪ���ĵ�·������Ԫ����·��Ӧ���ýӲ���һ�廯�Ľ��߶��ӡ�����ͨ�����߿��ٲ�ӣ�Ҳ���Թ���ѹ�Ӷ��ӽ��н��ߡ�
4������վ��
��1�����ʹ�����װ�ã����ʹ�����ʱ������Ӧ�ڴ��ʹ��Ͻ������ɶ�λ�������������ڲ�ͬλ�õļ�⣬�ּ�ץȡ�ȹ��ܡ�
��2����ҵ��е��װ�ã��豸Ҫ���ṩ��ҵ�����˺�ֱ�������е�ֵ����ֹ�ҵ��е��װ�ã���ϵͳ����Ҫ�������ϵİ��˻��߽��й���װ��ȹ������ܸ��ݲ�ͨ�Ĺ�����������ϻ��߹��ܻ�������ҵ�������ڰ��˻�װ��Ĺ����У����ݲ�ͬ�İ��˶�����߲�ͬ��װ�����̣���Ҫ�õ���ͬ��3�ּоߣ������㲻ͬ�Ĺ�װҪ��
��3����ѹװ�ã��������徫�ӹ�����ѹװ�ð���������̨��ģ���ͷ�ͳ崲,����̨���/�������ȡ���װ��Ҫ���ܰѸõ�Ԫ����̨�ϵĹ�����������ץȡ��е��װ�ù����������͵���ѹ�������棬���һ�γ�ѹ�ӹ�������Ȼ�����ͻص�����̨�ϣ��ȴ���е��װ��ȡ����
��4��������ת����תװ�ã��������徫�ӹ��������ڼ����߽���װ��ʱ����Ҫ�Թ������в�ͬ�Ƕȵ�ʶ��У�����ͨ����е�ֺ�װ�䵥Ԫ����װ�䡣��ת����Ӧ�����㹤���ڹ���̨ƽ��������Ƕȵ���ת��λ��У����ת����Ӧ�����㹤���ڴ�ֱ��������180�ȵķ�ת��
��5���о����̣��������徫�ӹ������̲���3×3������ƣ�ÿ�����̿ɷ��ö��ֲ�ͬ���Ե����ϣ�����ʱ��ͨ����ҵ������ֱ����������ץȡ��
��6����������1��������ٵ����380V��Լ25W��ת��1300r/min��1̨��ƽƤ��1��������������3ֻ�����ص�Ż���3ֻ��ModbusTCP �Ӿ������� 1�ף�������������1ֻ�����Կ���3ֻ�����˴�����1ֻ���������3����
��7����������2������2������Ʒ�ƿɱ�̿�����+��չģ�顣Ҫ��125 KB �����洢����24VDC ��Դ�����������벻���� 22�� x 24VDC ©��/Դ�ͣ���������������� 18�� x 24VDC �� AI2 ������ 6 �����ټ������� 4 ������������źŰ���չ���� I/O����� 3 �����ڴ���ͨ�ŵ�ͨ��ģ�飻��� 8 ������ I/O ��չ���ź�ģ�飻0.04 ms/1000 ��ָ�1�� PROFINET �˿ڣ����ڱ�̡�HMI �� PLC ������ͨ�š�
��8����������2������ָʾ�ƺͰ�ťģ�飬����10��DC24Vָʾ�ƣ���ת����2������ť����3������ͣ1����
��9����ҵ�����������ڹ�ҵ�����ˡ������Ӿ���PLC�����������������ṩ≥8�����ǹ�����������
��10�������һ�廯���߶��ӣ��豸��PLC I/O ���ӡ���Ƶ���Ľ��߶��ӡ���ָ��ء���翪�ء���������ָʾԪ���ĵ�·������Ԫ����·��Ӧ���ýӲ���һ�廯�Ľ��߶��ӡ�����ͨ�����߿��ٲ�ӣ�Ҳ���Թ���ѹ�Ӷ��ӽ��н��ߡ�
5������վ��
��1�����ʹ�����װ�ã����ʹ�����ʱ������Ӧ�ڴ��ʹ��Ͻ������ɶ�λ�������������ڲ�ͬλ�õļ�⣬�ּ�ץȡ�ȹ��ܡ��ڴ��ʹ����˴���Ƶ��Ͽڣ�ͨ����紫����������ϡ�
��2������װ�ã�ת��ʽ���ϵײ�Ӧװ��ֱ�����ٵ������Ϊ��ת��������ͨ������װ�����������ڲ�������ҶƬ���ӣ�����ʱ��ֱ�������������ҶƬ��ת���������������Ͽڡ�
��3����������1����ת��������500�ߣ�1ֻ���������+������1�ף�����������3ֻ��˫������1ֻ�����ص�Ż���3ֻ����紫����2ֻ�����Կ���3ֻ������ʽ���ص�Դ1����ָʾ��ģ��1�ס�
��4����������2�����ò�����7���ɫ��������������̫��ͨѶ�ӿڡ����װ�װ֧�ܣ����Ƶ�Դ���ؿ��ơ�
��5�������һ�廯���߶��ӣ��豸��PLC I/O ���ӡ���Ƶ���Ľ��߶��ӡ���ָ��ء���翪�ء���������ָʾԪ���ĵ�·������Ԫ����·��Ӧ���ýӲ���һ�廯�Ľ��߶��ӡ�����ͨ�����߿��ٲ�ӣ�Ҳ���Թ���ѹ�Ӷ��ӽ��н��ߡ�
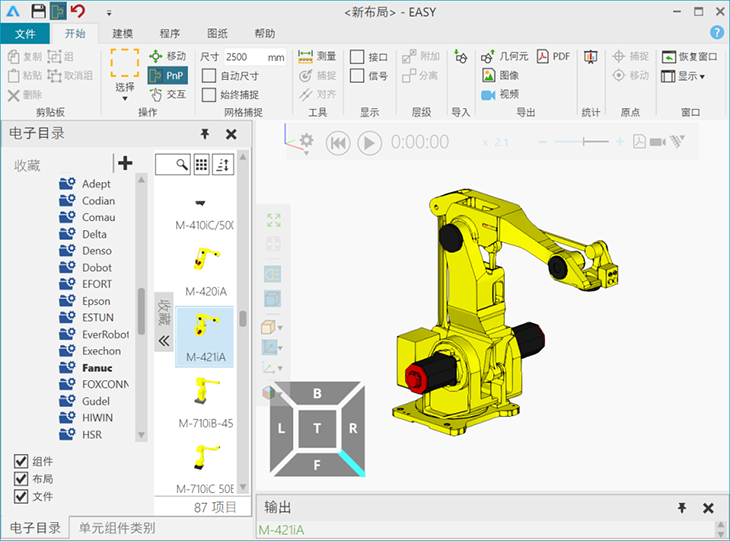
6����ҵ�����ˣ�6�Ṥҵ�����ˣ��˶��뾶Ҫ��550mm�������2KG��
��1����������4kg
��2�������뾶550mm
��3���ظ���λ����±0.02mm
��4�����������
4.1 �� 1 ��ת��340°
4.2 �� 2 �ֱۣ�230°
4.3 �� 3 �ֱۣ�402°
4.4 �� 4 ����380°
4.5 �� 5 ������240°
4.6 �� 6 ��ת��720°
��5��������ٶ�
5.1 J1 �����ת��460°/s
5.2 J2 ���ǰ��360°/s
5.3 J3 ������£�520°/s
5.4 J4 ������ת��560°/s
5.5 J5 ����������560°/s
5.6 J6 ����Ťת��900°/s
��6�������ȼ���IP20~IP50
��7�������˱���������20kg
��8����װ������Ƕ�
��9�������¶ȣ������˱��壩��5-45��
��10�������˿��ƹ�
10.1 �����˿������ߴ磨mm����470*322*400mm��±5%��
10.2 ������������40kg
10.3 ���������¶ȣ���תʱ 0~45�� ����ʹ���ʱ 20~+60�� �¶�ϵ��0.3��/min
10.4 �����ȼ���IP20~IP50
10.5 ����ϵͳ����Դ������Ԫ����ȫ������·������/���ģ�顢���ص�Ԫ
��11��ʾ����
11.1 �ߴ�Լ280×200×130mm��±5%��
11.2 ��Ļ�ߴ�4.3��
11.3 ����1.0kg
7���Ƴ� 1 ̨
�����ܲ������Ͻ��Ͳġ������ְ���ͼ���װ�ṹ�����γߴ磺��LxWxH����605x600x1005mm��̨������15mmMDF���ܰ壬̨�濿�˲����б��30°Բ������ƣ��ʼ����Σ��ı߽ǵ�ԲR30����������3060˫������Ͳģ����Ҳ���L�������ְ�һ���Գ��ͼӹ̼�֧�ţ�̨������������ְ��ѹ���͵�Χ�壬������ʾ�����䣻̨�������������ְ�һ�γ����յļ����У��Ϸ���һ�γ��Ͱ��ۣ������ɱʻ�С���ߣ��·����п�360°��ת���ɵ�����а壬������þ������죬�ɳ���10kg�����̲��������ְ����ѹ�����գ����˲����Բ������ƣ��ɸ����������ȴ�С���ɵ��ڶ�λ���ײ�װ��ֻ2�羲����ɲ���۰������߽��֣��ƶ����㡣
8����������
��1������ ���ֹ������������ 1 ��
��2����ȫ���� 1
��3������ Φ4\Φ6 1 ��
��4��ͨ���� ������������ͨ���ߡ� 1 ��
��5���� 1 ��
9��������1�ף� ���������䡢�������ñ��������ǰ��֣����ף�������֡�б��ǯ������ǯ������ǯ��ѹ��ǯ���ӱ���˿����ʮ����˿����һ����˿���ȡ�
10������ 1��
��1���� Դ: 220V
��2�������550W
��3��������55L/min
��4���������ѹ��0.7MPa
��5������������24L
11����Ʒ����U�����������˵����� 1 ��
12��������������������ܡ����������ܡ����롢�߲۵� 1 ��
�ġ�ʵѵ����Ϣ����ѧ��Դ������һ��
1.���ֹ��������������
�������������Ϊ�߶�������ҵ�����ܹ�����������ֻ�ģ�����Ӧ��ƽ̨�����˻����̡�3D ��ɢ�������̷���ģ�⡢���������߱�̺�PLC ������Ե�������ͬһ��ƽ̨��ͨ��ƽ̨�û����Կ��ٽ������ֻ�������滮�����̷��桢��������֤(PLC)��ʵʱ���ӡ������˺�����Ԫ���桢Ӧ�ÿ��������߱�� OLP����
 �塢��Ҫ����˵����
Ø�������ֽ���
Ø CAD ����
�������
Ø������ʾ�̱��
Ø PLC �������
Ø���ӻ�����
Øͳ�ƺͱ���
�塢��Ҫ����˵����
Ø�������ֽ���
Ø CAD ����
�������
Ø������ʾ�̱��
Ø PLC �������
Ø���ӻ�����
Øͳ�ƺͱ���
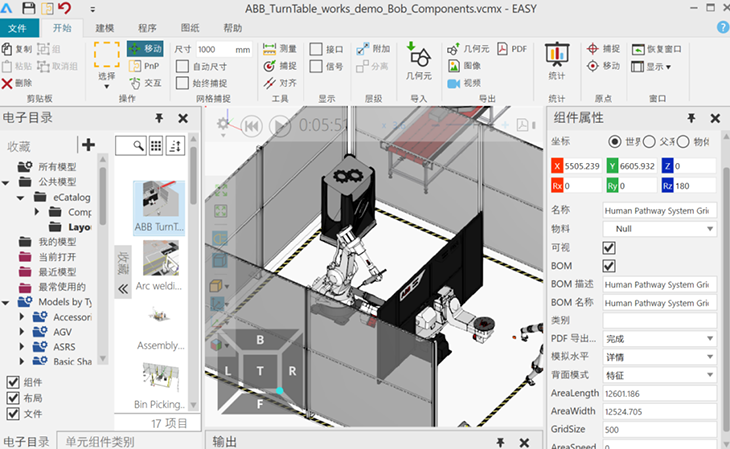 Ø������漼���漰���ϵͳ���˶�ѧ�붯��ѧ��ģ���ۼ��似��ʵ�֣��ǻ������ֺ��˶����ƽ�ģ�����桢��Ϣ����������ʽ�û������������ʵ���ۺ�Ӧ�ü����������ܳ�����Ƶij�������ξͿ��Զ�����ϵͳ���������ķ������۲첢ʵ����������˶������ͨ��ϵͳ���������������Ӧ���������ʵ��ģ�������ߵ��˶��ͽ��ģ��ڼ�����Ͽɷ���������ȱ�ݣ����治ͬ�IJ��ַ�������������ϵͳ���в��ϵĸĽ���ֱ��������ŵ���������������Ʒ������봫ͳ������Ⱦ���������ƣ��������ܳ������ʱ�ڼ�ȷ���ؼ��IJ��������²�Ʒ�������̣����̿������ڡ����ͳɱ�����߲�Ʒ���������ܳ����������Ĺؼ������������·��棺
1��ϵͳ������
���ܹ�����������������漰�����ļ������������ִ�л�����Ҫ�ڲ�ͬ��ϵͳ�����ת�����伯���������·��棺
����CAD�н����Ļ��������������������άģ�ͣ�֧���Զ�������Ĺ����鼸�Σ���Ϊ������
����ͽ�ģ��������Ϊ�������ڻ����˵㶯�������ɴ��Ժ���ײ���Լ�ʹ�ÿ���������䶨��������������ƣ��Ի����˽��пɴ��Է�������ײ��⣻
��ʵ��������Ի��������Ժ���֤�������Լ��������������еı�����ռ��ͷ���ʵʱ���ݣ�Ȼ����Ժ�ģ��Ľ���
Ø������漼���漰���ϵͳ���˶�ѧ�붯��ѧ��ģ���ۼ��似��ʵ�֣��ǻ������ֺ��˶����ƽ�ģ�����桢��Ϣ����������ʽ�û������������ʵ���ۺ�Ӧ�ü����������ܳ�����Ƶij�������ξͿ��Զ�����ϵͳ���������ķ������۲첢ʵ����������˶������ͨ��ϵͳ���������������Ӧ���������ʵ��ģ�������ߵ��˶��ͽ��ģ��ڼ�����Ͽɷ���������ȱ�ݣ����治ͬ�IJ��ַ�������������ϵͳ���в��ϵĸĽ���ֱ��������ŵ���������������Ʒ������봫ͳ������Ⱦ���������ƣ��������ܳ������ʱ�ڼ�ȷ���ؼ��IJ��������²�Ʒ�������̣����̿������ڡ����ͳɱ�����߲�Ʒ���������ܳ����������Ĺؼ������������·��棺
1��ϵͳ������
���ܹ�����������������漰�����ļ������������ִ�л�����Ҫ�ڲ�ͬ��ϵͳ�����ת�����伯���������·��棺
����CAD�н����Ļ��������������������άģ�ͣ�֧���Զ�������Ĺ����鼸�Σ���Ϊ������
����ͽ�ģ��������Ϊ�������ڻ����˵㶯�������ɴ��Ժ���ײ���Լ�ʹ�ÿ���������䶨��������������ƣ��Ի����˽��пɴ��Է�������ײ��⣻
��ʵ��������Ի��������Ժ���֤�������Լ��������������еı�����ռ��ͷ���ʵʱ���ݣ�Ȼ����Ժ�ģ��Ľ���
 2�����ģ�Ϳ⼴�弴�ü��ɣ����ٹ������֣�������ٹ���ʦCAD��ģ��
�����˶��㷨��ʱ�䡣
3�����ӻ��뽻���Ի��������ܹ�����������ṩ�����õ�ģ����ʾ������ ʹ�������и���ʵ�Եij����С����ھ��п��ӻ���������ƣ��ڲ��ֹ滮�����й���ʦ�Ŷӿɽ���ʽ̽�����ܹ����Ĺ��ܣ���ֽ������ľ����������ϵ������������������ƹ����С�
����ʾ����
ØPLC���ӣ�������ԣ�
ØPLC�ĵ��Կ���ʵ���������ߵ��Ժ�Ӳ�����ߵ��ԡ�
�������ߵ��Կ���ͨ����Ƕ������PLC��Ӧ�̵ı�������ͷ���ϵͳ���ӣ���ȫʵ��������ԡ�
Ӳ�����ߵ����ӹ���ʹ������ʹ����ҵ��OPC UA��֧�ֵĹ�Ӧ���ض��ӿ����ɵؽ�ģ�������ϵͳ���ӡ���������ʵ��������Ի��������Ժ���֤�������Լ��������������еı����ͨ��PLC���ӣ��������Կ��ӻ�������ʵʱ����ռ��ͷ���ʵʱ���ݣ�Ȼ����Ժ�ģ��Ľ���
2�����ģ�Ϳ⼴�弴�ü��ɣ����ٹ������֣�������ٹ���ʦCAD��ģ��
�����˶��㷨��ʱ�䡣
3�����ӻ��뽻���Ի��������ܹ�����������ṩ�����õ�ģ����ʾ������ ʹ�������и���ʵ�Եij����С����ھ��п��ӻ���������ƣ��ڲ��ֹ滮�����й���ʦ�Ŷӿɽ���ʽ̽�����ܹ����Ĺ��ܣ���ֽ������ľ����������ϵ������������������ƹ����С�
����ʾ����
ØPLC���ӣ�������ԣ�
ØPLC�ĵ��Կ���ʵ���������ߵ��Ժ�Ӳ�����ߵ��ԡ�
�������ߵ��Կ���ͨ����Ƕ������PLC��Ӧ�̵ı�������ͷ���ϵͳ���ӣ���ȫʵ��������ԡ�
Ӳ�����ߵ����ӹ���ʹ������ʹ����ҵ��OPC UA��֧�ֵĹ�Ӧ���ض��ӿ����ɵؽ�ģ�������ϵͳ���ӡ���������ʵ��������Ի��������Ժ���֤�������Լ��������������еı����ͨ��PLC���ӣ��������Կ��ӻ�������ʵʱ����ռ��ͷ���ʵʱ���ݣ�Ȼ����Ժ�ģ��Ľ���
|
���ض��� �� |
|
|





