电工、电子、电拖技能实训设备
立式通用电工、电子、电拖实训设备
电子技能及生产工艺实训设备
高性能电工、电子、电拖、电气实训设备
维修电工实训考核设备
供配电技术实训装置
农村通信系统线路实训装置
工厂电气控制供电实训装置
PLC可编程实训装置
PLC编程及自动化实验室设备
家用电器实训设备
PLC控制液压与气动实训装置
机电一体化实训设备
变频调速、工业自动化实训装置
数控机床电气维修实训考核设备
普通机床实训设备
机床电气技能培训及考核装置
钳工实验台、焊铆工实训设备
智能楼宇实训设备
工程制图实验室设备
财会模拟实验室设备
化工过程控制实训装置
风能、太阳能发电实训装置
煤矿安全技术培训装置
轨道交通实训系统设备
船舶、智能数码产品实训装置
机械工程技能实训设备
工程机械模拟教学仪
汽车模拟驾驶器
汽车发动机实训设备
汽车全车电器实验台
汽车空调系统实验台
汽车实物解剖模型
汽车底盘实训设备
汽车变速器实训台
汽车发动机拆装及翻转架设备
汽车示教板
汽车程控电教板
透明汽车教学模型
汽车整车综合实训系统
汽车驾校培训设备
新能源汽车教学实训装置
汽车实验箱
立式通用电工、电子、电拖实验室成套设备
电工、模电、数电、电气控制实验室设备
军用车辆实训教学设备
高级电工、电子、电机实验室设备
电工、电子、电气、电机实验室设备
数控技术实验室设备
家用电器电子实验室设备
单片机微机实验装置
传感器综合实验台
空调制冷制热实验室设备
多媒体数字语音设备
透明仿真教学电梯模型
理化生实验室设备
环境工程实验装置
流体力学实验室设备
热工类教学实验装置
化工原理实验装置
化工单元操作实训装置
制药工程实验装置
采暖通风和空调制冷实验装置
化学工程化学工艺实验装置
教学实验箱
机械示教陈列柜
机械多媒体仿真设计综合实验装置
机械教学模型
中学理科教学仪器
机械教学挂图
机械试验设备
心肺复苏模拟人
教学类软件
新闻中心
主页
>
新闻中心
>
单回路控制系统实验的概述
发布时间:2024-08-24
一、单回路控制系统的概述
图3.1为单回路控制系统方框图的一般形式,它是由被控对象、执行器、调节器和测量变送器组成一个单闭环控制系统。系统的给定量是某一定值,要求系统的被控制量稳定至给定量。由于这种系统结构简单,性能较好,调试方便等优点,故在工业生产中已被广泛应用。
图2.2.1 单回路控制系统方框图
二、干扰对系统性能的影响
1.干扰通道的放大系数、时间常数及纯滞后对系统的影响。
干扰通道的放大系数Kf会影响干扰加在系统中的幅值。若系统是有差系统,则干扰通道的放大系数愈大,系统的静差也就愈大。
如果干扰通道是一惯性环节,令时间常数为Tf,则阶跃扰动通过惯性环节后,其过渡过程的动态分量被滤波而幅值变小。即时间常数Tf越大,则系统的动态偏差就愈小。
通常干扰通道中还会有纯滞后环节,它使被调参数的响应时间滞后一个τ值,但不会影响系统的调节质量。
2.干扰进入系统中的不同位置。
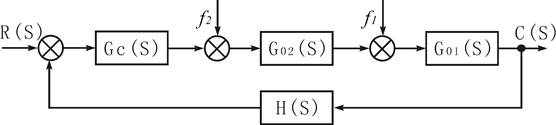
复杂的生产过程往往有多个干扰量,它们作用在系统的不同位置,如图3-2所示。同一形式、大小相同的扰动作用在系统中不同的位置所产生的静差是不一样的。对扰动产生影响的仅是扰动作用点前的那些环节。
图3.2 扰动作用于不同位置的控制系统
三、控制规律的选择
PID控制规律及其对系统控制质量的影响已在有关课程中介绍,在此将有关结论再简单归纳一下。
1.比例(P)调节
纯比例调节器是一种最简单的调节器,它对控制作用和扰动作用的响应都很快。由于比例调节只有一个参数,所以整定很方便。这种调节器的主要缺点是系统有静差存在。其传递函数为:
GC(s)= KP =
(3-1)
式中KP为比例系数,δ为比例带。
2.比例积分(PI)调节
PI调节器就是利用P调节快速抵消干扰的影响,同时利用I调节消除残差,但I调节会降低系统的稳定性,这种调节器在过程控制中是应用最多的一种调节器。其传递函数为:GC(s)=KP(1+
)=
(1+
) (3-2)
式中TI为积分时间。
3.比例微分(PD)调节
这种调节器由于有微分的超前作用,能增加系统的稳定度,加快系统的调节过程,减小动态和静态误差,但微分抗干扰能力较差,且微分过大,易导致电动调节阀动作向两端饱和。因此一般不用于流量和液位控制系统。PD调节器的传递函数为: GC(s)=KP(1+TDs)=
(1+TDs) (3-3)
式中TD为微分时间。
4.比例积分微分(PID)调节器
PID是常规调节器中性能最好的一种调节器。由于它具有各类调节器的优点,因而使系统具有更高的控制质量。它的传递函数为
GC(s)=KP(1+
+TDs)=
(1+
+TDs) (3-4)
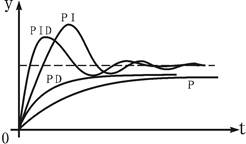
图3-3表示了同一对象在相同阶跃扰动下,采用不同控制规律时具有相同衰减率的响应过程。
图3.3 各种控制规律对应的响应过程
四、调节器参数的整定方法
调节器参数的整定一般有两种方法:一种是理论计算法,即根据广义对象的数学模型和性能要求,用根轨迹法或频率特性法来确定调节器的相关参数;另一种方法是工程实验法,通过对典型输入响应曲线所得到的特征量,然后查照经验表,求得调节器的相关参数。工程实验整定法有以下四种:
(一)经验法
若将控制系统按照液位、流量、温度和压力等参数来分类,则属于同一类别的系统,其对象往往比较接近,所以无论是控制器形式还是所整定的参数均可相互参考。表3-1为经验法整定参数的参考数据,在此基础上,对调节器的参数作进一步修正。若需加微分作用,微分时间常数按TD=(
~
)TI计算。
表3-1 经验法整定参数
系 统
参 数
δ(%)
TI(min)
TD(min)
温 度
20~60
3~10
0.5~3
流 量
40~100
0.1~1
压 力
30~70
0.4~3
液 位
20~80
临界比例度法
这种整定方法是在闭环情况下进行的。设TI=∞,TD=0,使调节器工作在纯比例情况下,将比例度由大逐渐变小,使系统的输出响应呈现等幅振荡,如图3.4所示。根据临界比例度δk和振荡周期TS,按表3-2所列的经验算式,求取调节器的参考参数值,这种整定方法是以得到4:1衰减为目标。
表3-2 临界比例度法整定调节器参数
调节器参数
调节器名称
δ
TI(S)
TD(S)
P
2δk
PI
2.2δk
TS/1.2
PID
1.6δk
0.5TS
0.125TS
临界比例度法的优点是应用简单方便,但此法有一定限制。首先要产生允许受控变量能承受等幅振荡的波动,其次是受控对象应是二阶和二阶以上或具有纯滞后的一阶以上环节,否则在比例控制下,系统是不会出现等幅振荡的。在求取等幅振荡曲线时,应特别注意控制阀出现开、关的极端状态。
衰减曲线法(阻尼振荡法)
在闭环系统中,先把调节器设置为纯比例作用,然后把比例度由大逐渐减小,加阶跃扰动观察输出响应的衰减过程,直至出现图3-5所示的4:1衰减过程为止。这时的比例度称为4:1衰减比例度,用δS表示之。相邻两波峰间的距离称为4:1衰减周期TS。根据δS和TS,运用表3-3所示的经验公式,就可计算出调节器预整定的参数值。
表3-3 衰减曲线法计算公式
调节器参数
调节器名称
δ(%)
T
I
(min)
T
D
(min)
P
δ
S
PI
1.2δ
S
0.5T
S
PID
0.8δ
S
0.3T
S
0.1 T
S
(四)动态特性参数法(反应曲线法)
所谓动态特性参数法,就是根据系统开环广义过程阶跃响应特性进行近似计算的方法,即根据第二章中对象特性的阶跃响应曲线测试法测得系统的动态特性参数(K、T、τ等),利用表3-4所示的经验公式,就可计算出对应于衰减率为4:1时调节器的相关参数。如果被控对象是一阶惯性环节,或具有很小滞后的一阶惯性环节,若用临界比例度法或阻尼振荡法(4:1衰减)就有难度,此时应采用动态特性参数法进行整定。
表3-4 经验计算公式
调节器参数
调节器名称
δ(%)
T
I
T
D
P
×100%
PI
1.1
×100%
3.3τ
PID
0.85
×100%
2τ
0.5τ
上一篇:
电气实训操作室规划方案
下一篇:
气动PLC控制综合实训装置,气动实验台
返回顶部 ↑
网站首页
|
关于我们
|
产品展示
|
新闻中心
|
售后服务
|
技术文章
|
产品导航
|
联系我们
相关产品:
支付宝
,
百度
,
友情链接:
财会模拟实验室设备
,
邮箱:285729858@qq.com
沪ICP备16028912号-1