|
|
|
|
浅谈串级控制系统
发布时间:2024-10-01 |
一、串级控制系统的概述
图4-1是串级控制系统的方框图。该系统有主、副两个控制回路,主、副调节器相串联工作,其中主调节器有自己独立的给定值R,它的输出m1作为副调节器的给定值,副调节器的输出m2控制执行器,以改变主参数C1。
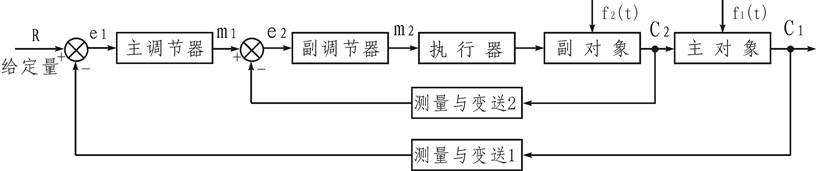
图4-1 串级控制系统方框图
R-主参数的给定值; C1-被控的主参数 ; C2-副参数;
f1(t)-作用在主对象上的扰动; f2(t)-作用在副对象上的扰动。
二、串级控制系统的特点
串级控制系统及其副回路对系统控制质量的影响已在有关课程中介绍,在此将有关结论再简单归纳一下。
1.改善了过程的动态特性;
2.能及时克服进入副回路的各种二次扰动,提高了系统抗扰动能力;
3.提高了系统的鲁棒性;
4.具有一定的自适应能力。
三、主、副调节器控制规律的选择
在串级控制系统中,主、副调节器所起的作用是不同的。主调节器起定值控制作用,它的控制任务是使主参数等于给定值(无余差),故一般宜采用PI或PID调节器。由于副回路是一个随动系统,它的输出要求能快速、准确地复现主调节器输出信号的变化规律,对副参数的动态性能和余差无特殊的要求,因而副调节器可采用P或PI调节器。
四、主、副调节器正、反作用方式的选择
正如单回路控制系统设计中所述,要使一个过程控制系统能正常工作,系统必须采用负反馈。对于串级控制系统来说,主、副调节器的正、反作用方式的选择原则是使整个系统构成负反馈系统,即其主通道各环节放大系数极性乘积必须为正值。
各环节的放大系数极性是这样规定的:当测量值增加,调节器的输出也增加,则调节器的放大系数Kc为负(即正作用调节器),反之,Kc为正(即反作用调节器);本装置所用电动电动调节阀的放大系数Kv恒为正;当过程的输入增大时,即调节器开大,其输出也增大,则过程的放大系数K0为正,反之K0为负。
五、串级控制系统的整定方法
在工程实践中,串级控制系统常用的整定方法有以下三种:
(一) 逐步逼近法
所谓逐步逼近法,就是在主回路断开的情况下,按照单回路的整定方法求取副调节器的整定参数,然后将副调节器的参数设置在所求的数值上,使主回路闭合,按单回路整定方法求取主调节器的整定参数。而后,将主调节器参数设在所求得的数值上,再进行整定,求取第二次副调节器的整定参数值,然后再整定主调节器。依此类推,逐步逼近,直至满足质量指标要求为止。
(二) 两步整定法
两步整定法就是第一步整定副调节器参数,第二步整定主调节器参数。
整定的具体步骤为:
1.在工况稳定,主回路闭合,主、副调节器都在纯比例作用条件下,主调节器的比例度置于100%,然后用单回路控制系统的衰减(如4:1)曲线法来整定副回路。记下相应的比例度δ2S和振荡周期T2S。
2.将副调节器的比例度置于所求得的δ2S值上,且把副回路作为主回路中的一个环节,用同样方法整定主回路,求取主回路的比例度δ1S和振荡周期T1S。
3.根据求取的δ1S、T1S和δ2S、T2S值,按单回路系统衰减曲线法整定公式计算主、副调节器的比例度δ、积分时间TI和微分时间Td的数值。
4.按“先副后主”,“先比例后积分最后微分”的整定程序,设置主、副调节器的参数,再观察过渡过程曲线,必要时进行适当调整,直到过程的动态品质达到满意为止。
(三) 一步整定法
由于两步整定法要寻求两个4:1的衰减过程,这是一件很花时间的事。因而对两步整定法做了简化,提出了一步整定法。所谓一步整定法,就是根据经验先确定副调节器的参数,然后将副回路作为主回路的一个环节,按单回路反馈控制系统的整定方法整定主调节器的参数。
具体的整定步骤为:
1.在工况稳定,系统为纯比例作用的情况下,根据K02/δ2=0.5这一关系式,通过副过程放大系数K02,求取副调节器的比例放大系数δ2或按经验选取,并将其设置在副调节器上。
2.按照单回路控制系统的任一种参数整定方法来整定主调节器的参数。
3.改变给定值,观察被控制量的响应曲线。根据主调节器放大系数K1 和副调节器放大系数K2的匹配原理,适当调整调节器的参数,使主参数品质指标最佳。
4.如果出现较大的振荡现象,只要加大主调节器的比例度δ或增大积分时间常数TI,即可得到改善。 |
|
返回顶部 ↑ |
|
|




