|
|
|
|
了解步进电机的工作原理
发布时间:2024-06-04 |
一、 实验目的
1. 了解步进电机的工作原理。
2. 掌握用FPGA产生驱动步进电机的时序。
3. 掌握用FPGA来控制步进电机转动的整个过程。
二、 实验原理
步进电机是工业控制及仪表中常用的控制元件之一,例如在机械装置中可以精确控制机械装置的旋转角度、移动距离等。步进电机可以直接用数字信号来驱动,使用非常方便。另外步进电机还具有快速起停、精确步进和定位的特点。
步进电机实际上是一个数据/角度转换器,三相步进电机的结构原理如下图5-15-1所示:
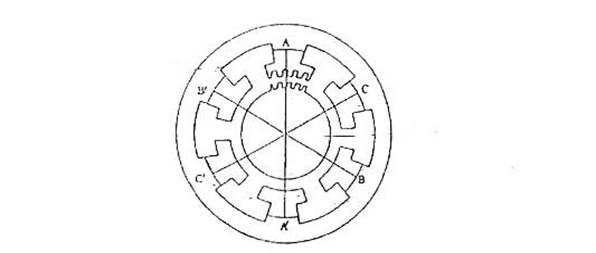
图5-15-1 三相步进电机的结构示意图
从图中可以看出,电机的定子有六个等分的磁极,A、A’、B、B’、C、C’,相邻的两个磁极之间夹角为60°,相对的两个磁极组成一组(A—A’,B—B’,C—C’),当某一绕组有电流通过时,该绕组相应的两个磁极形成N极和S极,每个磁极上各有五个均分布的矩形小齿,电机的转子上有40个矩形小齿均匀地分布在圆周上,相邻两个齿之间夹角为9°。
⑴当某一相绕组通电时,对应的磁极就产生磁场,并与转子转动一定的角度,使转子和定子的齿相互对齐。由此可见,错齿是促使步进电机旋转的原因。
例如在三相三拍控制方式中,若A相通电,B、C相都不通电,在磁场作用下使转子齿和A相的定子齿对齐,我们以此作为初始状态。设与A相磁极中心线对齐的转子的齿为0号齿,由于B相磁极与A相磁极相差120°不是9°的整数倍(120÷9=13 2/3) ,所以此时转子齿没有与B相定子的齿对应,只是第13号小齿靠近B相磁极的中心线,与中心线相差3°,如果此时突然变为B相通电,A、C相不通电,则B相磁极迫使13号转子齿与之对齐,转子就转动3°,这样使电机转子一步。如果按照A—AB—B—BC—C—CA—A次序通电则为正转。通常用三相六拍环形脉冲分配器产生步进脉冲。
⑵运转速度的控制。若改变ABC三相绕组高低电平的宽度,就会导致通电和断电的变化速率变化,使电机转速改变,所以调节脉冲的周期就可以控制步进电机的运转速度。
⑶旋转的角度控制。因为输入一个CP脉冲使步进电机三相绕组状态变化一次,并相应地旋转一个角度,所以步进电机旋转的角度由输入的CP脉冲数确定。
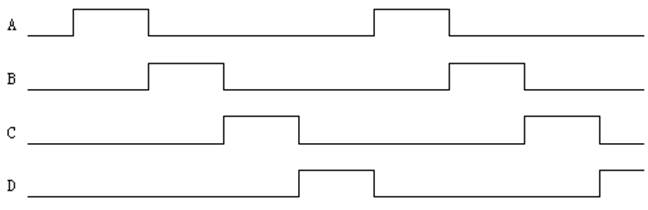
本实验箱所使用步进电机为4相步进电机,最小旋转角度为7.5度,其正向转动控制时序如下所示,每一个脉冲控制其转过7.5度。
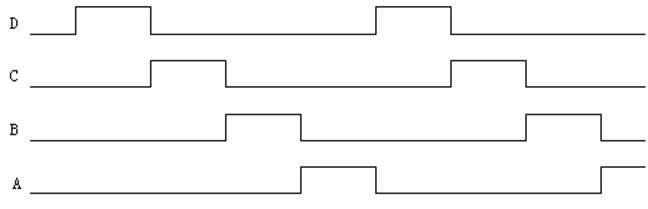
反向转动控制时序如下:
三、 实验内容
本实验要完成的任务就是设计步进电机的控制电路。通过一个拨动开关K1来控制步进电机的顺时针和逆时针旋转;通过八个按键开关BT1-BT8来控制步进电机旋转的角度。
四、 实验步骤
1、 打开QUARTUSII软件,新建一个工程。
2、 建完工程之后,再新建一个VHDL File,打开VHDL编辑器对话框。
3、 按照实验原理和自己的想法,在VHDL编辑窗口编写VHDL程序,用户可参照光盘中提供的示例程序。
4、 编写完VHDL程序后,保存起来。方法同实验一。
5、 将自己编辑好的的程序进行编译仿真,并对程序的错误进行修改,最终通过编译。
6、 编译仿真无误后,根据用户自己的要求进行管脚分配。分配完成后,再进行全编译一次,以使管脚分配生效。
7 根据实验内容用实验导线将上面管脚分配的FPGA管脚与对应的模块连接起来。
如果是调用的本书提供的VHDL代码,则实验连线如下:
Clk:FPGA工作所需时钟信号,输入为1KHZ左右。
Key7_5、key15、key30、key45、key90、key180、key360、key8:分别代表旋转7.5度、15度、30度、45度、90度、180度、360度和多转,分别与8个按键相连,按下相应的按键可以是步进电机转过相应的角度。
Keyorder:旋转方向控制信号与一个拨动开关相连,高电平时正转;低电平时反转。
Astep、bstep、cstep、dstep:分别与步进电机模块的A、B、C和D相连。
8、 用下载电缆通过JTAG口将对应的sof文件加载到FPGA中。观察实验结果是否与自己的编程思想一致。
五、 实验结果与现象
以设计的参考示例为例,当设计文件加载到目标器件后,按动按键开关BT1-BT8,步进电机将会按照程序设计的相应的步进角度进行旋转。拨动拨动开关的K1,步进电机旋转的方向将会发生改变。
六、 实验报告
1、 绘出仿真波形,并作说明。
2、 将实验原理、设计过程、编译仿真波形和分析结果、硬件测试结果记录下来。 |
|
返回顶部 ↑ |
|
|




